03 - malujeme dům¶
Ve třetím úkolu nebudeme jen jezdit, ale zkusíme i kreslit. Takže papír, tužku, izolepu a jdeme kreslit. Zkusíme si robotem nakreslit dům. Pro kreslení je asi nejvhodnější fix a k robotovy ji můžeme přidělat pomocí izolepy na přední packu. Pamatuj na to, že střed robota není střed fixe. S tímto musí váš program počítat.
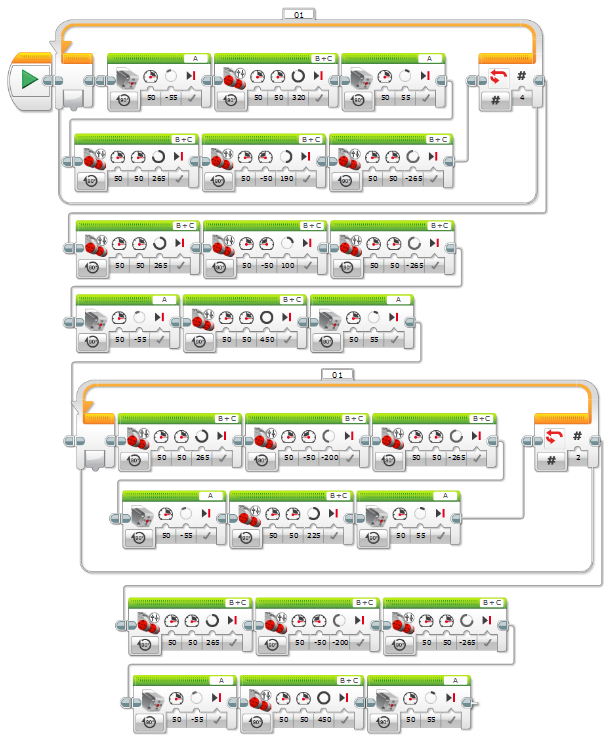
Tento program je již složitější a rozsáhlejší, tak se zkus inspirovat třeba diagramy z LEGO Softwaru.
/**
* This is sample program for draw a house by a simple two-wheel robot, holding a pen
*
* Don't forget set position of pen_motor UP!
*
* Author: Jaroslav Páral (jarekparal)
*/
#include "ev3cxx.h"
#include "app.h"
void main_task(intptr_t unused) {
ev3cxx::MotorTank motors(ev3cxx::MotorPort::B, ev3cxx::MotorPort::C);
ev3cxx::Motor pen_motor(ev3cxx::MotorPort::A);
motors.onForRotations(50, 50, 1);
for (int i = 0; i != 4; ++i) {
pen_motor.onForDegrees(50, -55);
motors.onForDegrees(50, 50, 320);
pen_motor.onForDegrees(50, 55);
motors.onForDegrees(50, 50, 265);
motors.onForDegrees(50, -50, 190);
motors.onForDegrees(50, 50, -265);
}
motors.onForDegrees(50, 50, 265);
motors.onForDegrees(50, -50, 100);
motors.onForDegrees(50, 50, -265);
pen_motor.onForDegrees(50, -55);
motors.onForDegrees(50, 50, 450);
pen_motor.onForDegrees(50, 55);
for (int i = 0; i != 2; ++i) {
motors.onForDegrees(50, 50, 265);
motors.onForDegrees(50, -50, -200);
motors.onForDegrees(50, 50, -265);
pen_motor.onForDegrees(50, -55);
motors.onForDegrees(50, 50, 225);
pen_motor.onForDegrees(50, 55);
}
motors.onForDegrees(50, 50, 265);
motors.onForDegrees(50, -50, -200);
motors.onForDegrees(50, 50, -265);
pen_motor.onForDegrees(50, -55);
motors.onForDegrees(50, 50, 450);
pen_motor.onForDegrees(50, 55);
}